|
|
[��å] ��������� �� 
-
- ���Կ���
- Ȯ�ξȵ�
- ���ǿ���
- ǥ��ȵ�
-
- ���ǻ�
- ������б����ǹ�ȭ��(SNUPRESS)
 ���ǻ� ��ü����")
- ISBN
- 9788952117441
-
- ����
- ���μ�
-
- ����
- ����ǰ��
-
- ��������
- 512 , 182x257(B5�����) , 2015.05.15
-
- �������
- ��å
-
- ����
- ���ֽ� ������ ��å��

-
- ����
-
25,000��
-
- �ǸŰ�
-
25,000��
(�ҵ��������: 1,125�� �ڼ���)
-
- ��ۺ�
- ������
|
å�߰���
������
�Ǹŵ��� : 328,714 ��
����ó :
010-3403-0912
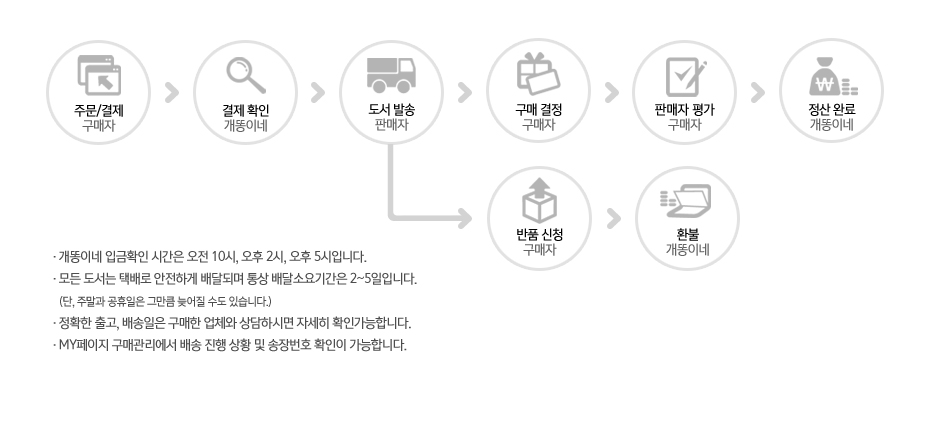
��۷� : ���Ǻ� ���� (20,000�� �̸� 3,000��)
|
|
|
���ֽ� ������ ��å��
å�߰��� �Ǹ��ڰ� ����� �̹����Դϴ�.


����ǰ��

�Ӹ���
������ �Ӹ���
��1�� ��İ� Gauss �ҰŹ�
1.1. Matrix
1.2. Gaussian Elimination
1.3. Elementary Matrix
1.4. Equivalence Class�� Partition
��2�� ���Ͱ���
2.1. Vector Space
2.2. Subspace
2.3. Vector Space�� ����
2.4. Isomorphism
��3�� ������ ����
3.1. Linear Combination
3.2. ���������� ��������
3.3. Vector Space�� Basis
3.4. Basis�� ����
3.5. Vector Space�� Dimension
3.6. �츮�� ö��
3.7. Dimension�� ����
3.8. Row-reduced Echelon Form
��4�� �������
4.1. Linear Map
4.2. Linear Map�� ����
4.3. Linear Extension Theorem
4.4. Dimension Theorem
4.5. Rank Theorem
��5�� �⺻����
5.1. Vector Space of Linear Maps
5.2. �⺻����: ǥ�ر����� ���
5.3. �⺻����: �Ϲ����� ���
5.4. �⺻������ ����� �츮�� ö��
5.5. Change of Bases
5.6. Similarity Relation
��6�� ��Ľ�
6.1. Alternating Multilinear Form
6.2. Symmetric Group
6.3. Determinant�� ���� I
6.4. Determinant�� ����
6.5. Determinant�� ���� II
6.6. Cramer��s Rule
6.7. Adjoint Matrix
��7�� Ư�����İ� �밢ȭ
7.1. Eigen-vector�� Eigen-value
7.2. Diagonalization
7.3. Triangularization
7.4. Cayley-Hamilton Theorem
7.5. Minimal Polynomial
7.6. Direct Sum�� Eigen-space
Decomposition
��8�� ��������
8.1. Polynomial
8.2. T-Invariant Subspace
8.3. Primary Decomposition Theorem
8.4. Diagonalizability
8.5. T-Cyclic Subspace
8.6. Cyclic Decomposition Theorem
8.7. Jordan Canonical Form
��9�� Rn�� Rigid Motion
9.1. Rn-������ Dot Product
9.2. Rn-������ Rigid Motion
9.3. Orthogonal Operator / Matrix
9.4. Reflection
9.5. O(2)�� SO(2)
9.6. SO(3)�� SO(n)
��10�� ���� ����
10.1. Inner Product Space
10.2. Inner Product Space�� ����
10.3. Gram-Schmidt Orthogonalization
10.4. Standard Basis �� Orthonormal Basis
10.5. Inner Product Space�� Isomorphism
10.6. Orthogonal Group�� Unitary Group
10.7. Adjoint Matrix�� �� ����
��11�� ��
11.1. Binary Operation�� Group
11.2. Group�� �ʺ��� ����
11.3. Subgroup
11.4. �к� ������� ��
11.5. Group Isomorphism
11.6. Group Homomorphism
11.7. Cyclic Group
11.8. Group�� Homomorphism�� ����
11.9. Linear Group
��12�� Quotient
12.1. Coset
12.2. Normal Subgroup�� Quotient Group
12.3. Quotient Space
12.4. Isomorphism Theorem
12.5. Triangularization II
��13�� Bilinear Form
13.1. Bilinear Form
13.2. Quadratic Form
13.3. Orthogonal Group�� Symplectic Group
13.4. O(1, 1)�� O(3, 1)
13.5. Non-degenerate Bilinear Form
13.6. Dual Space�� Dual Map
13.7. Duality
13.8. B-Identification
13.9. Transpose Operator
��14�� Hermitian Form
14.1. Hermitian Form
14.2. Non-degenerate Hermitian Form
14.3. H-Identification�� Adjoint Operator
��15�� Spectral Theorem
15.1. ǥ����� ���
15.2. Normal Operator
15.3. Symmetric Operator
15.4. Orthogonal Operator
15.5. Epilogue
��16�� Topology ������
16.1. Matrix Group Isomorphism
16.2. Compactness�� Connectedness
���� ����
ǥ��� ã�ƺ���
ã�ƺ���
|

������ �������� ��ǰ�� �Ǹ��ϴ� �ٸ� �Ǹ����� �ֹ������� ���ԵǾ� �ֽ��ϴ�.
|
|
|
|
|
|
|
|














 ��Ƽ�ö��̾�
��Ƽ�ö��̾�